※記事内に広告を含みます
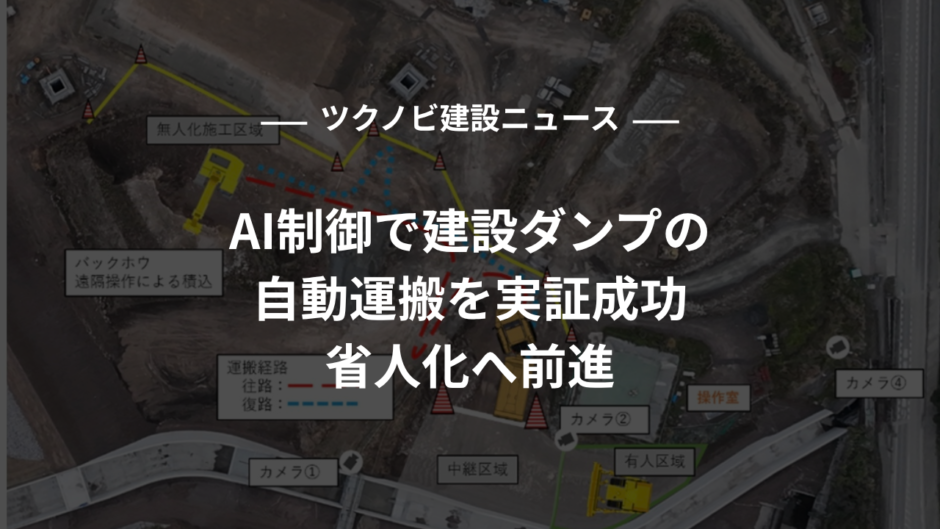
建設現場の運搬作業を無人で行う技術が、実用段階に近づいています。熊谷組は、アーティキュレートダンプトラック(ADT)をAIで自動走行させる技術を開発し、ダム現場でのコンクリート埋戻し作業で実証実験を実施しました。最高速度12.5km/hに対して平均速度差が0.85km/h未満という高い追従精度を達成しており、実用に十分な性能が確認されています。
今回の技術の核心は「仮想レール方式」です。まずオペレーターが実際にダンプを運転して走行ルートを教示します。AIがその軌跡を「見えないレール」として記録し、以降は車両がそのレールに沿って自動で走行します。
ダム工事特有のスイッチバック(切り返し走行)にも対応しており、アーティキュレートダンプならではの車体の折れ角をセンサで取得しながら精密に制御します。また、GNSS軌跡をもとに走行精度をリアルタイムで可視化するソフトウェアも開発されており、管理者が現場状況を把握しやすい体制も整っています。

建設業界では生産年齢人口の減少と高齢化が深刻な課題となっており、ダンプオペレーターの確保は年々難しくなっています。繰り返し性の高い運搬作業は自動化との相性が良く、オペレーターの負担軽減と省人化の両面で効果が期待されます。国土交通省が推進するi-Construction2.0でも現場のオートメーション化が重要課題として掲げられており、今回の実証はその具体的な一歩となります。
熊谷組は今後、フィジカルAIの導入によるさらなる制御精度の向上と、複数台のダンプを同時に管理する運行システムの実現を目指す方針です。自動化技術の積み重ねが、建設現場の人手不足問題を着実に解消していきます。
参考:https://www.kumagaigumi.co.jp/news/2026/pr-20260325-004090.html